







本文利用客户的真实应用案例进行说明。某位客户购买了北微传感的倾角传感器BWL317产品,采用485通信方式,客户将产品接入自己板子做系统集成,一主二从。在使用过程中,客户发现上位机01地址码会自动跳变,给使用过程造成了不便。北微售后...

自动化光学检测技术已广泛应用于工业场景,现有研究集中在理论模型和系统设计上。在工业生产环境中,对于不同类型和规格的产品,有必要根据产品缺陷的检测及时调整检测参数的阈值,以提高设备的检测率。本文对采集设备检测到的缺陷数据进...

MEMS惯性装置具有精度低,噪声高的特点。而MEMS传感器的误差会随着时间的推移而累积,长期不能满足姿态测量的要求。针对MEMS传感器的上述特性,设计了一种基于扩展卡尔曼滤波器(EKF)的姿态估计算法。图1:建议模型的架构在本文中,载体...

一种用于车辆运动的高动态姿态解决方案和计算系统,该系统将三轴陀螺仪与三轴加速度计和速度计结合在一起,用于测量和计算车辆导航信息。针对运动状态下的姿态算法,提出了一种基于四元数的扩展卡尔曼滤波算法。图1 算法结构通过欧拉角和...

移动机器人在军事,工业,农业,商业,运输和物流领域具有广阔的应用前景。移动机器人的核心问题在于移动机器人的自主导航能力。基于MEMS传感器的惯性导航系统是近年来惯性导航领域的研究热点之一,也是未来的主要研究方向之一。针对移动...

本文提出了一种利用加速度计和磁力计计算飞机坐标系,然后转换为地理坐标系的方法。参照重力矢量和地磁矢量找出误差,然后使用此错误优化陀螺仪的输出,以解决陀螺仪中累积的漂移差异。最后使用陀螺仪的数据更新四元数,并转换为欧拉角以...

在城市化进程中,大型建筑物已成为人们栖身立业的主要场所。实现室内三维定位,可以更好地进行人群行动规划,出现火灾等意外时也可以更好保障人员财产安全,所以室内定位问题具有重要研究价值。 以惯性元件为基础的室内三维定位系统...

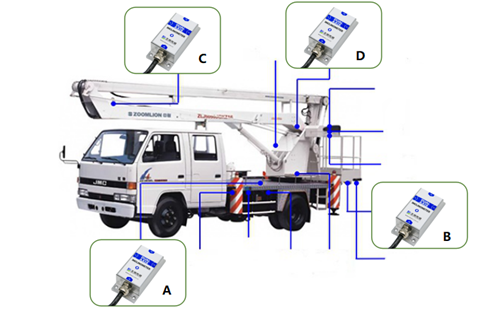
高空作业车是电力、通讯、交通、市政、消防、救援、建筑等行业进行施工、维护修理等作业的理想设备。随着我国国民经济的蓬勃发展,高空作业车的需求量迅速上升。高空作业车的升降方式有折叠式、伸缩式和混合式等多种形式,作业高度从十几...
有关对产品安装、使用及维护等问题,
可以通过这里联系我们











版权所有 © 2017-2025 无锡北微传感科技有限公司 苏ICP备14001101号-3



